Beste leden en andere belangstellenden,
Bij het bouwen van een modelboot bedenk ik altijd welke functies voor mijn boot van toepassing kunnen zijn. Deze opsomming kwam in handen van mijn collega Henk. En hij reageerde op trilmotor. Wat moet dat nu voorstellen. Daar kan ik me met de beste wil van de wereld geen voorstelling van maken. Hans wat bedoel je daarmee. Ik zei dat die opsomming van functies ontstonden in mijn gedachten en daar moet je je nog niets van aantrekken want er zitten hersenspinsels bij.
Maar Henk was Henk niet als hij er toch mee op een idee werd gezet. En op een van onze winterse bouw avonden kwam hij met zijn trilmotor. Hij had het idee uitgewerkt. Heel simpel had hij op een vertragingsmotor van de firma Bühler een schijf messing gemonteerd. De schijf is twee cm in doorsnee en een cm dik. Verder is er dicht bij de rand een gat gemaakt voor opname op de as van de motor. Ook is er nog een gat met schroefdraad gemaakt om het schijfje, met behulp van een inbusboutje, op de as vast te kunnen zetten. Verder heeft Henk de schijf ook voorzien van een kap zodat er geen kabels in verstrikt kunnen geraken. Het geheel is, in de Gar in aanbouw, gemonteerd direct achter de aandrijfmotor. Dus heel centraal onder in de romp om het meeste effect te hebben. En toen heeft Henk een bad gevuld en uitgetest of het idee ook werkte. Nou het werkte. Hij was er heel tevreden mee dus spinsel geslaagd en een functie extra.
Je ziet duidelijk als de motor gestart is dat er rondom de boot rimpels ontstaan.
Alleen ontbrak er nog aan hoe de motor aan en uitgezet moest worden in onze boot. De motor verbruikt niet al teveel stroom (100 mA) maar het is toch onnodig om de motor te laten lopen als de boot vaart en er van die rimpels helemaal niets meer te zien zou zijn.
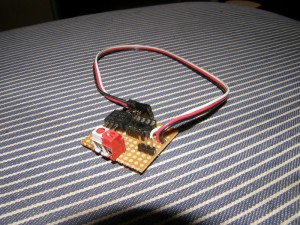
Ik heb daar de volgende schakeling voor ontworpen. Bij PICAXE kun je microprocessoren (pic) kopen die eenvoudig programmeerbaar zijn met een basic programmaatje. Een pic de 08 versie heb ik gebruikt om het kanaal van de ontvanger naar de vaartregelaar te onderbreken en te interpreteren. in de pic. Als er nu een ontvanger signaal van 1,45 ms tot 1,55 ms ontvangen wordt dan gaat de tril motor draaien. Daar buiten dus tussen 1 ms en 1,45 ms en 1,55 ms en 2 ms draait de tril motor niet want bij dat signaal wordt de vaartregelaar aangesproken. De schakeling bestaat verder nog uit een fet die de tril motor van de benodigde stroom voorziet. En een servo steker en contra steker. En dat is alles. Voor verdere info:
Bühler motoren: http://www.hobbieplaza.nl
Pics: http://www.rev-ed.co.uk/picaxe/
en de foto’s: